شبکه های حسگر بی سیم زیر آب UWSN

شبکه های حسگر بی سیم زیر آب
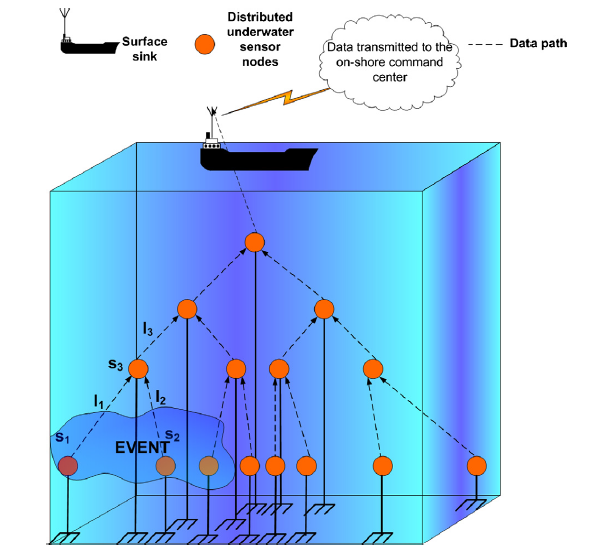
شبکه های حسگر بی سیم زیر آب (UWSN) اخیراً توجه بسیاری از محققین حوزه فناوری اطلاعات و علوم دریایی را به خود جلب نموده است. در شبکه های حسگر بی سیم زیر آب، گره ها با سرعت ۱ الی ۳ متر بر ثانیه در حال حرکت هستند. در شکل زیر یک معماری از شبکه های حسگر بی سیم زیر آب ، قابل مشاهده می باشد:
تفاوت شبکه های WSN با UWSN
شبکه های حسگر بی سیم زیر آب با شبکه های حسگر بی سیم زمینی (WSN) در جنبه های زیر متفاوت است.
- پهنای باند کم
- تأخیر زیاد
- تحرک شناور گره ها
- احتمال خطای بالا
- فضای سه بعدی
کاربردهای شبکه های حسگر زیرآب
شبکه های حسگر بی سیم زیر آب، کاربرد گسترده ای دارد. از جمله کاربردهای شبکه های حسگر بی سیم زیر آب می توان به موارد زیر اشاره کرد.
- تحقیقات محیطی
- ناوبری همراه با کمک
- مانیتورینگ آلودگی
- کنترل بلادرنگ وسیله های زیرآبی خودکار (AUV)
- جستجوی منابع و معادن
- پایش تاکتیکی
- تحقیقات ساحلی
- ناوبری و کنترل زیردریایی ها
چالش های موجود در شبکه های UWSN
برای عملی و کاربردی شدن شبکه های UWSN ابتدا باید بتوانیم یک مشخصه آماری برای کانال ارتباطات زیر آب ارائه دهیم. کانال UWSN یکی از چالش برانگیرترین کانال های ارتباطی بی سیم می باشد. تحقیقات انجام شده در حوزه شبکه های حسگر بی سیم زیر آب حاکی از این واقعیت است که مشکلات ارتباطات در این شبکه ها به خاطر تضعیف بالای سیگنالها و نویز محیط پیرامون در آب می باشد.
علاوه بر این، یکی دیگر از موانع آنها سرعت پایین انتشار سیگنال در محیط زیر آب می باشد و این موضوع به شدت تحت تأثیر انعکاس های بازگشتی از سطح و کف اقیانوس و همچنینتغییرات سرعت صوت در عمق های مختلف آب می باشد. تمام این تغییرات در رسانه، موجب پخش زاویه ای و دوپلر وابسته به مسیر می شود که منجر به پیدایش تأخیر متغیر با زمان می شود.
بنابراین یکی از مهم ترین مسئله تبادل اطلاعات در محیط زیر آب، مسئله تأخیر می باشد که یک الگوریتم مسیریابی با تأخیر پایین می تواند راه حل مناسبی برای این موضوع به حساب بیاید.
پروتکل های مسیریابی در شبکه های حسگر زیر آب
۷۱ درصد سطح زمین با آب پوشانده شده است. شبکه های حسگر بی سیم زیرآب، سیگنال صوتی را به عنوان رسانه انتقال به کار می گیرند. به دلیل اینکه امواج رادیوئی در زیر آب خیلی ضعیف عمل می کنند. سرعت سیگنال صوتی ۵ برابر کمتر از امواج رادیوئی است.
برای شبکه های حسگر بی سیم زیر آب ، پروتکل های مسیریابی زیادی در سال های اخیر ارائه شده است. پروتکل ها می توانند بر اساس تأکیدهای مختلف دسته بندی کرد. با در نظر گرفتن مسیر ارتباطی، پروتکل ها می توانند به صورت زیر تقسیم بندی شوند:
- پروتکل های مبتنی بر مسیر ارتباطی
- پروتکل های بدون مسیر ارتباطی
پروتکل های مبتنی بر مسیر ارتباطی
وقتی یک گره منبع بسته هایی برای ارسال دارد آن فقط بسته ها را به گره های Hop بعدی اش مطابق با مسیر ارتباطی مربوط با این گره منبع ارسال می کند و گره های Hop بعدی بسته ها را به گره های Hop بعدی شان ارسال خواهند کرد.
به این صورت بسته ها به گره مقصد خواهند رسید. تحرک گر ه های حسگر می تواند ساختار مسیر ارتباطی ایجاد شده را مختل کند. ایجاد دوباره مسیر ارتباطی هزینه های اضافی انرژی و زمان را به همراه دارد.
پروتکل های بدون مسیر ارتباطی
وقتی گره ای بسته ای برای ارسال دارد مسیر ثابت برای آنها وجود ندارد، آنها فوراً نیاز به پیدا کردن گره های هاپ بعدی مناسب مطابق با روش مسیریابی دارند. این نوع پروتکل ها هیچ نیازی به انرژی و زمان اضافی برای ایجاد و حفظ مسیر ارتباطی ندارند.
نقطه کلیدی این پروتکل ها در نحوه پیدا کردن مناسب ترین گره های Hop بعدی است. یک بسته می تواند به تک گره Hop بعدی و یا چندین گره Hop بعدی فرستاده شود. پروتکل های مسیریابی زیادی از تکنولوژی پخش (broadcast) استفاده می کند و بعضی پارامترها را برای کنترل تعداد Hop های بعدی معرفی می کند.
پروتکل مسیریابی VBF
پروتکل VBF یکی از پروتکل های مسیریابی در شبکه های حسگر زیر آب می باشد که تأکید این پروتکل در کاهش تأخیر در مسیریابی اطلاعات می باشد. در VBF، هر بسته موقعیت مبدأ، مقصد و ارسال کننده را دارد. مسیر ارسال به وسیله بردار بین مبدأ و مقصد مشخص می شود.
اگر یک گره تعیین کند که به اندازه کافی به بردار مسیریابی نزدیک باشد (اگر از یک حد آستانه کمتر باشد) موقعیت محاسبه شده خود را در داخل بسته قرار می دهد و آن را ارسال می کند. در غیر این صورت بسته را حذف می کند. بنابراین مسیر ارسالی به صورت مجازی یک مسیر لوله ای(pipe) از منبع به مقصد است. گره های حسگر داخل این لوله، شایسته برای ارسال هستند.
اگر فاکتور مطلوبیت ( آلفا) نزدیک به صفر باشد به این معنی است که گره به بهترین موقعیت نزدیک است. وقتی یک گره بسته ای را دریافت می کند اول موقعیت خود را محاسبه میکند و تعیین می کند که آیا در داخل لوله مسیریابی است. اگر در داخل لوله مسیریابی باشد، گره، بسته را برای یک فاصله زمانی Tadaptation نگه می دارد. در مدت زمان Tadaptation ، اگر یک گره بسته های دیگری از طرف n گره دریافت کند، در این صورت گره فاکتور مطلوبیت را برای همه آنها محاسبه می کند.
VBF یک پروتکل مسیریابی سیل آسا است. بسته ها در یک لوله مسیریابی مجازی انتقال می یابند که این لوله به وسیله یک بردار و شعاع تعریف شده است. VBF همچنین یک پروتکل مسیریابی مبتنی بر مکان (Location) است که در آن هر گره ، موقعیت و مختصات خود را می داند.
پروتکل مسیریابی H2-DAB
DAB یک پروتکل مسیریابی مبتنی بر مسیر ارتباطی برای شبکه های حسگر بی سیم زیر آب است. گره های حسگر باید لایه ها را از بالا تا پایین تشکیل دهند. این پروتکل وظیفه اش را در دو مرحله انجام می دهد.
در مرحله اول چاهک با انتشار پیام Hello به هر گره شناور یک HopID پویا اختصاص می دهد. هر گرهی که پیام Hello را دریافت میکند آن را دوباره پخش می کند. در نهایت هر گره در شبکه می تواند مطابق با لایه ای که به آن متعلق است یک HopID داشته باشد. گره در لایه عمیق تر، HopID بزرگتری خواهد داشت.
در مرحله دوم بسته های داده مطابق با HopID ها تحویل داده خواهند شد. یک بسته همیشه به گره های با HopID کوچکتر فرستاده میشود. به عنوان یک نتیجه، با استفاده از این پروتکل تحویل بسته های داده می تواند خیلی ساده باشد، اما ایجاد توپولوژی لایه ها و اختصاص HopID هزینه های انرژی و زمان را به همراه دارد. علاوه براین حرکت گره های شناور، موقعیت ها را تغییر خواهد داد.
پروتکل فورواردینگ RDBF
RDBF خلاصه عبارت Relative Distance Based Forwarding Protocol for Underwater Wireless Networks می باشد. در واقع RDBF یک پروتکل فورواردینگ مبتنی بر فاصله نسبی برای شبکه های حسگر بی سیم زیر آب است.
فاصله تا چاهک در RDBF یک پارامتر ثابت و مطلق برای تصمیم گیری در مورد مناسب ترین گره به عنوان گره Hop بعدی است. از یک تابع شایستگی (Fitness) استفاده می شود که تناسب و اولویت گره های همسایه حسگر ارسال کننده (sender) را به منظور رله بسته نشان می دهد.
پروتکل EEF
EEF خلاصه عبارت Energy Efficient Fitness است. ابتدا گره منبع fitness خودش را محاسبه میکند. بعد از محاسبه مقدار fitness و مختصات مکانی خود را به بسته اضافه می کند و سپس بسته را پخش می کند. گره های همسایه ای که بسته را دریافت کرده اند، fitness خود را محاسبه می کنند.
سپس مقدار fitness خود را با مقدار fitness داخل بسته مقایسه می کند. اگر مقدار fitness گره دریافت کننده بسته از مقدار fitness داخل بسته بیشتر باشد بسته را ارسال خواهد کرد در غیر این صورت بسته را دور می ریزد. در این فرآیند ممکن است گره های بیشتری در ارسال بسته مشارکت کنند.
به منظور جلوگیری از ارسال بسته یکسان توسط گره های بیشتر، گره های ارسال کننده (Forwarding Nodes) برای مدت زمانی منتظر می مانند که آن (مدت زمان) بر اساس انرژی باقیمانده، عمق (depth) و فاصله گره ارسال کننده بسته (sending node) از گره دریافت کننده بسته (forwarding node) است. گره ای که شایسته تر است زمان کمتری منتظر می ماند.
در این پروتکل یک بسته شامل ۶ فیلد زیر است.
- Sender ID – SID
- Packet Sequence Number – PSN
- Sender Fitness – SF
- Sending Node’s Location – SNL
- Destination Node’s Location – DNL
- Data.
SID بیانگر شناسه (id) گره منبع است. PSN و SID به منظور ایجاد تمایز بین بسته های تولید شده مورد نیاز است.
گره با انرژی باقیمانده بیشتر برای ارسال بسته شایسته تر است و همچنین عمق (فاصله گره ارسال کننده (forward node) از چاهک) کمتر باشد.
فاصله بیشتر بین گره منبع (sending node) و گره ارسال کننده (forwarding node) باعث می شود بسته در زمان کمتری به چاهک برسد.
شبیه سازی شبکه های حسگر زیر آبی (UWSN)
شبیه ساز مورد استفاده برای شبکه های حسگر زیرآبی، شبیه ساز ns2 می باشد. البته ns2 به تنهایی، پشته پروتکل مربوط به شبکه های حسگر زیرآبی را فراهم نکرده و برای این کار ما افزونه Aquasim را روی شبیه ساز ns2 اضافی خواهیم کرد.
همانطور که می دانید، محیط زیر آب یک محیط ۳-بعدی محسوب می شود. ازانجا که انیماتور شبکه ns2 یعنی NAM یک انیماتور ۲-بعدی است، برای نمایش رویدادهای شبکه در محیط زیرآب از انیماتور Aqua-3d استفاده شده است.
معرفی کتاب
اصول طراحی شبکه های حسگر بی سیم زیر آب
فصول این کتاب به شرح ذیل است :
- – مقدمه در رابطه با شبکه های حسگر بی سیم زیر آب
- – مبانی آکوستیک و ارتباطات زیر آب
- – لایه دسترسی به رسانه در شبکه های زیر آب
- مسیریابی و لایه شبکه در شبکه های زیر آب
- همزمان سازی ساعت در شبکه های زیر آب
- تعیین موقعیت و تکنیک های Localization در شبکه های زیر آب
- خوشه بندی بهینه در شبکه های زیر آب
- مدل سازی و شبیه سازی شبکه های زیر آب
محیط شبیه سازی شبکه های حسگر زیر آب
برای شبیه سازی شبکه های حسگر زیرآب معمولاً از شبیه ساز آکواسیم (aquasim) استفاده می شود. این شبیه ساز یک سیمولاتور مبتنی بر ns2 است که در محیط لینوکس قابل اجرا می باشد. درواقع برای نصب آکواسیم شما نیاز به یک محیط لینوکسی مانند اوبونتو خواهید داشت که البته میتوانید با استفاده از ماشین مجازی، این محیط را در ویندوز داشته باشید. سپس لازم است شبیه ساز ns2 را در این محیط لینوکس نصب نمایید. پس از نصب ns2 باید aquasim را که در واقع یک افزونه بر روی ns2 است نصب یا patch نمایید. آکواسیم دارای یک انیماتور سه بعدی به نام Aqua3D نیز هست که برای نمایش گرافیکی سناریوهای شبکه در محیط زیرآب طراحی شده است.
حال می خواهیم محصولی را به شما معرفی کنیم که همه این کارها در آن انجام شده و به صورت یک ماشین مجازی آماده استفاده است. هیچگونه نصبی برای استفاده از این محیط نیاز نخواهد بود و کافی است ماشین مجازی را run کنید و از شبیه ساز آکواسیم نصب شده در آن استفاده نمایید. این محصول را می توانید از لینک زیر تهیه نمایید
پیشنهادات آموزشی
برای شبیه سازی شبکه های حسگر زیرآب شما نیاز به یادگیری شبیه سازی پروتکل های شبکه با NS2 را دارید. پیشنهاد ما به شما دوره آموزشی زیر است:
مطالب زیر را حتما مطالعه کنید


دوره های آموزشی مرتبط




دیدگاهتان را بنویسید